ATM-UC01 — Connected Automated Passenger Cars in Urban Scenario
Goal
Enable lateral and longitudinal Automated Control of a passenger car at vehicle automation SAE L4 in specific Operational Design Domains.
High Level Description
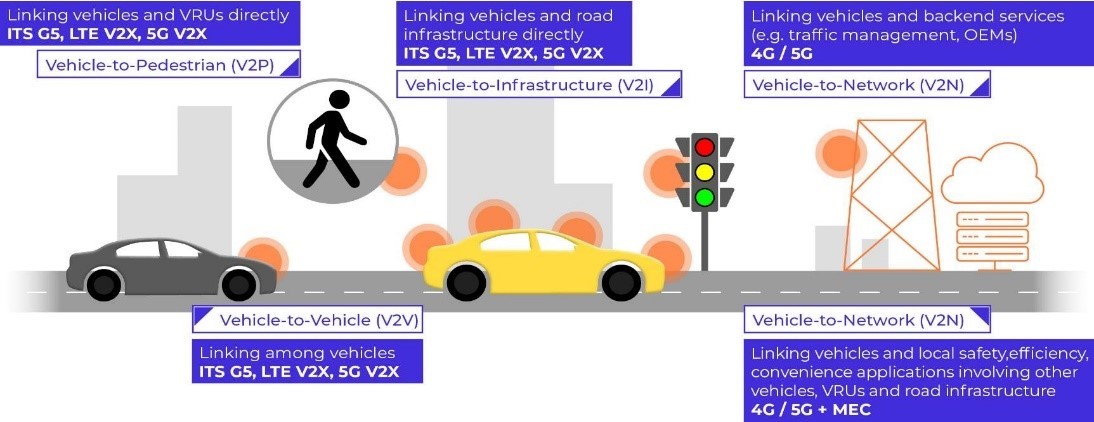
The vehicle builds a Digital Twin of its surrounding environment conditions continuously exchanging data with surrounding actors using V2X (Vehicle-to-Everything) Communication.
Vehicle external inputs are merged with on-board sensor data, enhancing accuracy and extending the vehicle’s perception beyond its immediate surroundings. The improved perception is then used by the path planning and control systems, enabling the vehicle to navigate potential hazards safely and make better overall decisions.
ATM-UC02 — Hazardous Location Warning
Goal
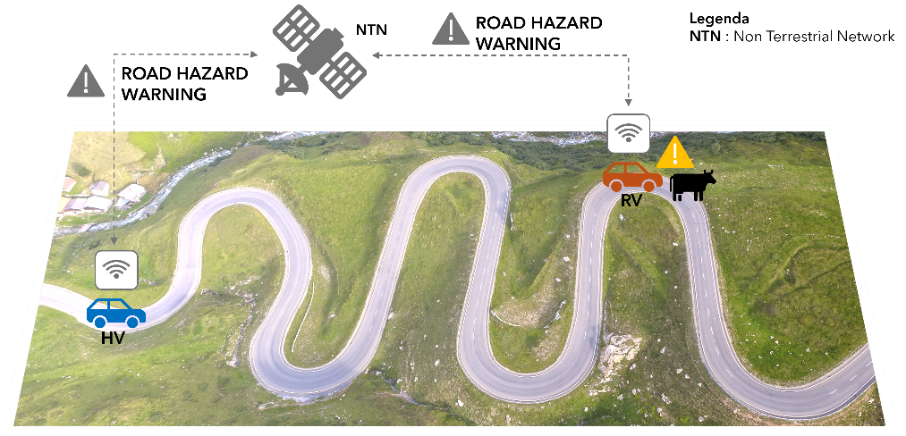
Enabling of more intelligent and responsive decision-making by providing real-time situational input data to the HV for timely ingestion and processing.
High Level Description
The HV is provided with shared near real-time data, seamlessly integrating alerts and inputs based on road conditions and potential hazards along the planned route or current path of travel. Some examples include but are not limited to:
Traffic congestion area detected by slowly moving RVs
Adverse weather condition areas detected by temperature changes and wiper activation.
Accident areas detected by air bag deployment events
Slippery road condition areas detected by traction control events
Disabled vehicles detected by hazard lamps or tyre pressure areas
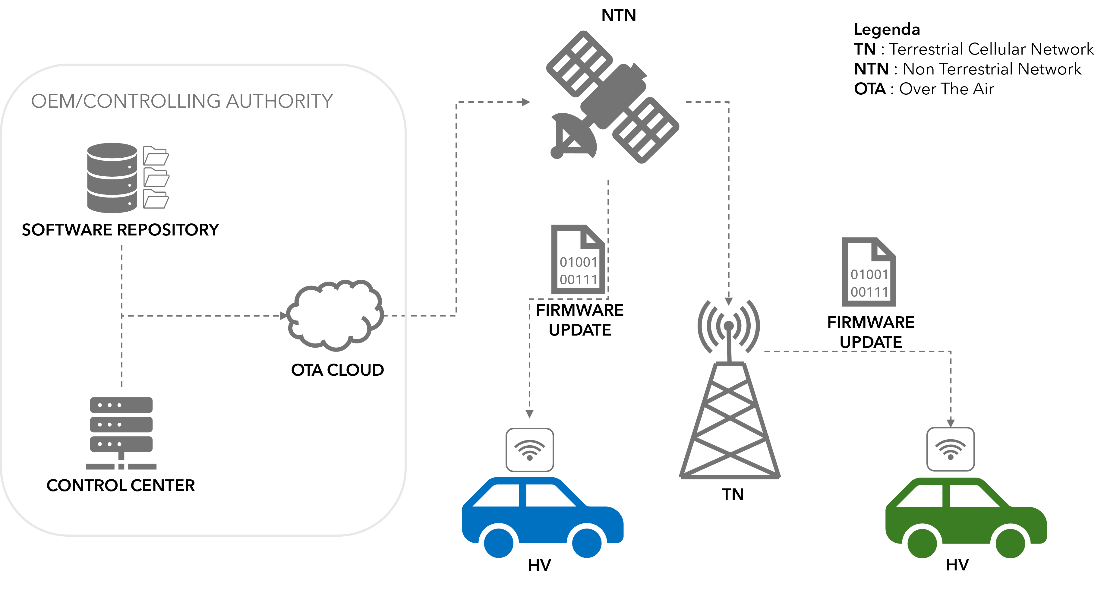
The Vehicle Manufacturer or Controlling Authority are capable of publishing over-the-air software updates for one or more ECUs on targeted HVs. Updates can be pushed and/or requested to install features or functionality based on regional or regulatory requirements.
ATM-UC04 — See-Through for Passing
Goal
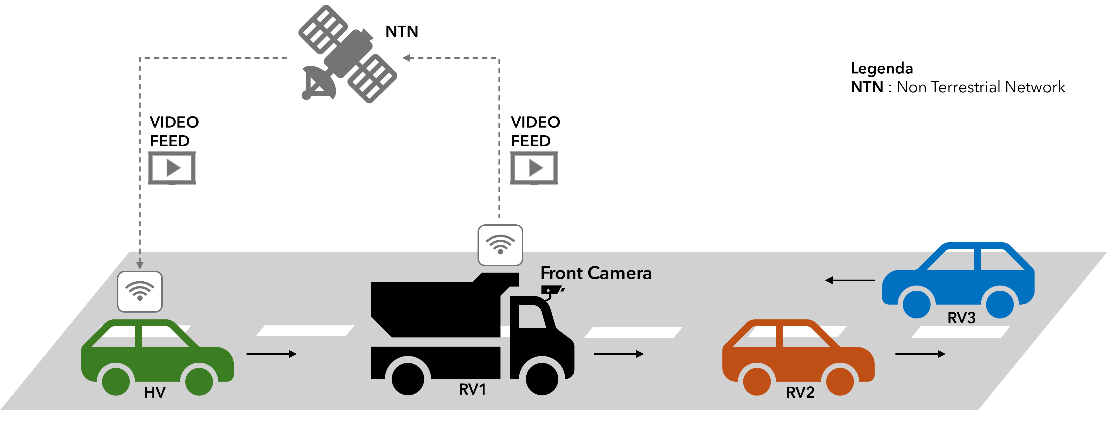
Collision avoidance by providing a clear, reliable and real-time view of the road situation in front of the vehicle.
High Level Description
A video stream of the RV1 front view is shown to the HV driver when approaching the vehicle with the intentions of initiating a passing maneuver using the oncoming traffic lane. The HV is provided with a clear, reliable and real-time view of the road situation in front of the vehicle allowing the driver to avoid a possible collision
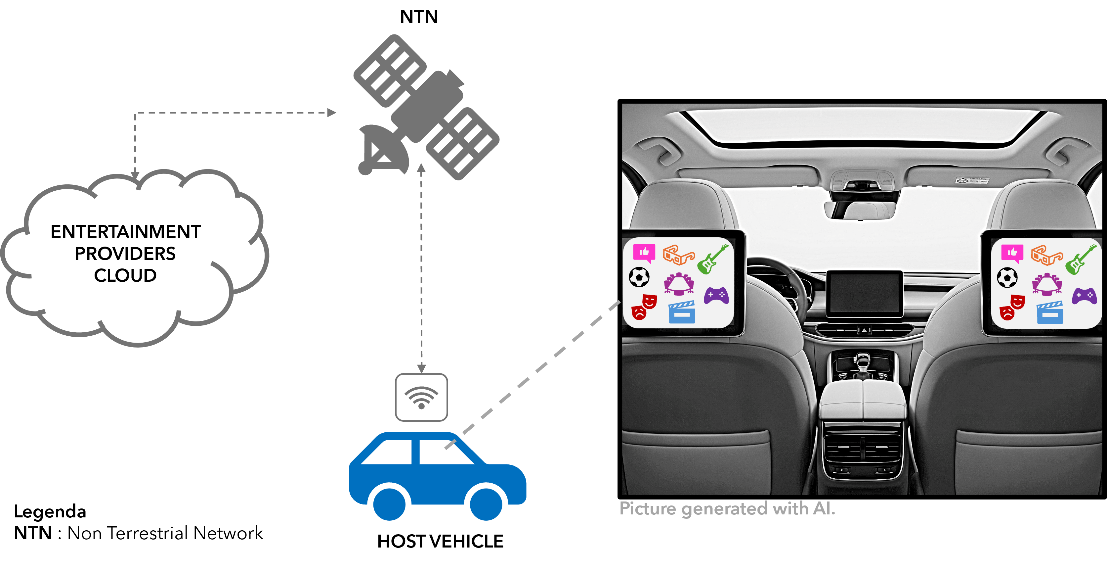
Supply and deliver on-demand HD entertainment content to the HV passengers.
High Level Description
The Use Case concerns entertainment content delivery to the passengers of a moving or stationary vehicle. It is applicable to both automated and non-automated vehicles, where in the latter the driver is restricted in the content he or she is allowed to consume.
For cars, up to four occupants can consume high-definition and immersive entertainment media content while the vehicle is stationary or moving. For buses and transporters up to 30 passengers can consume the same content under similar conditions. Each occupant may be interested in different content which may include video, gaming, virtual reality (VR), office work, online education, advertisement, etc.
Contextual information can be embedded in the entertainment media depending on the location of the HV.
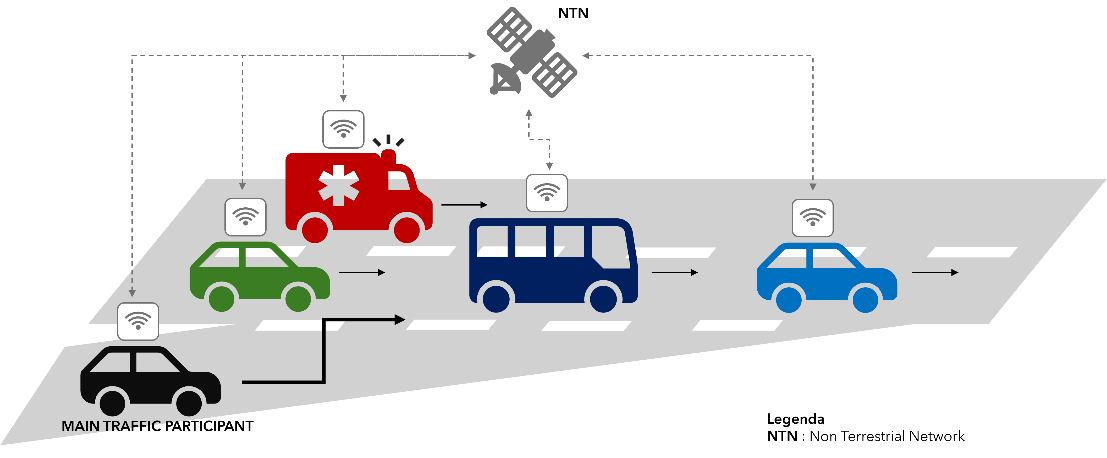
The main traffic participant is able to evaluate whether a certain manoeuvre can be performed. Other traffic participants are informed about manoeuvres planned by the main traffic participant.
High Level Description
A main traffic participant wants to perform a certain action (e.g. lane change, exit highway, U-turn, etc.). Participant shares this intention with other traffic participants potentially involved in the maneuver. The traffic participants indicate to the main traffic participant whether they support or plan to decline the planned maneuver. The main traffic participant informs a superset of the traffic participants informed whether it plans to perform the maneuver
NB: Assume that every vehicle, on average, might plan on performing a maneuver using this use case as a main traffic participant once 1-20 seconds on highways with less traffic.
Co-funded by the European Union
NexaSphere project has received funding from the Smart Networks and Services Joint Undertaking (SNS JU) under the European Union’sHorizon Europe research and innovation program under Grant Agreement No 101192912. Views and opinions expressed are, however, those of the author(s) only and do not necessarily reflect those of the European Union or 6GSNS JU. Neither the European Union nor the granting authority can be held responsible for them.